
복소공간 위에서 변환(transformation)의 기반이 되는 내용들을 살펴본다.
Definition
•
집합 와 가 주어졌을 때 함수 가 일 때 을 만족하면 일대일(surjective;one-to-one;1-1)이라고 한다. 여기서 이다.
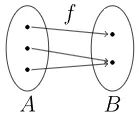
•
집합 A와 B가 주어졌을 때 함수 가 임의의 에 대해 를 만족하는 가 존재하면 대응(injective;onto)이라고 한다.
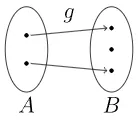
•
집합 의 함수 가 일대일 대응(bijective: surjective + injective)함수면 변환(transformation)이라고 한다.
집합 의 변환 는 역변환 을 가지며 에 대해 이고 를 만족한다. 역함수 는 [또한 집합 A의 변환(transformation)이 된다.
Basic Transformations of
•
일반선형변환(general linear transformation): (이고 )
•
일반선형변환의 특별한 형태들
◦
이동(translation; ):
◦
기준 회전(rotation; ):
◦
기준 회전(rotation; ):
◦
팩터(factor) 에 대한 확대(dilation):
•
직선 에 대한 리플렉션(reflection): (, )
example 3.1.2 Translation
복소수 에 대해 함수 가 아래와 같이 정의됬다고 하자.
를 이동(translation)라 하며 변환(transformation)이다.
Proof.
example 3.1.3 Rotation about the origin
를 각(angle)이라 하면 로 정의되고 이다.
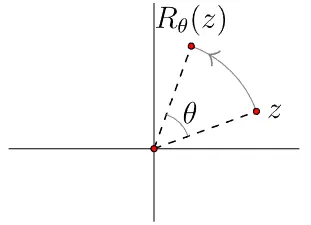
위 변환은 평면위의 점을 원점(origin)에 대해 각 만큼 회전시킨다(은 반시계방향이고 이면 시계방향이다). 이러한 경우를 보기위해 라 하고 아래와 같이 쓸 수 있다.
example 3.1.4 Rotation about any point
임의의 점 에 대해 각(angle) 의 회전을 하기 위해선 세가지 단계를 거친다. 먼저 평면을 옮겨 이 원점이 되도록 한다. 이 과정은 이동(translation) 함수를 사용한다. 다음 각 점을 만큼 원점에 대해 회전한다(). 마지막으로 모든 점을 다시 이동시킨다(). 이 변환과정은 아래와 같이 정리할 수 있다.
다시말하면 회전 은 합성함수 이고 아래와 같은 함수로 정리할 수 있다.
Theorem 3.1.5
만약 함수 와 가 집합 의 변환이라면 합성함수 또한 집합 의 변환이다.
Proof.
example 3.1.6 Dilation
실수 일 때 변환(transformation) 를 확장(dilation)이라고 한다. 이 함수는 의 값에 따라 평면 위의 점의 위치를 원점기준으로 늘리거나 줄인다.
만약 라면 이고 와 는 둘 다 원점을 지나는 직선위의 점이다. 만약 이면 는 원점과 멀어지는 방향으로 팽창시키는 함수가 되고 이면 원점과 가까운방향으로 축소시키는 함수가 된다. 수학에선 팽창과 축소를 구분하지 않고 확장함수(dilation function)라고 표현한다.
example 3.1.7 General Linear Transformations
이고 이고 인 함수를 일반선형변환(general linear transformation)이라 한다. 함수 가 에서의 변환(transformation)임을 보인다.
Proof.
Definition 3.1.8
가 변환(transformation)이고 가 의 부분집합(subset)이라고 하자. 부분집합 의 상(image)은 라고 표기하고 에 대한 모든 점 로 구성된다.
다시 말하면 아래와 같이 정리된다.
가령 이 직선(line)이고 가 만큼 이동시키는 함수일 때,또한 직선이 된다. 만약 평면 위의 직선이 이동한다면 그 또한 직선의 모양을 유지할 것이다. 사실, 직선(line)은 원(circle)과 같이 어떤 일반선형변환(general linear transformation)을 적용해도 유지된다. 이를 아래 Theorem을 통해 확인해보자.
Theorem 3.1.9
가 일반선형변환(general linear transformation)이라고 하면
1.
는 직선(line)을 직선(line)으로 매핑한다.
2.
는 원(circle)을 원(circle)로 매핑한다.
Proof.
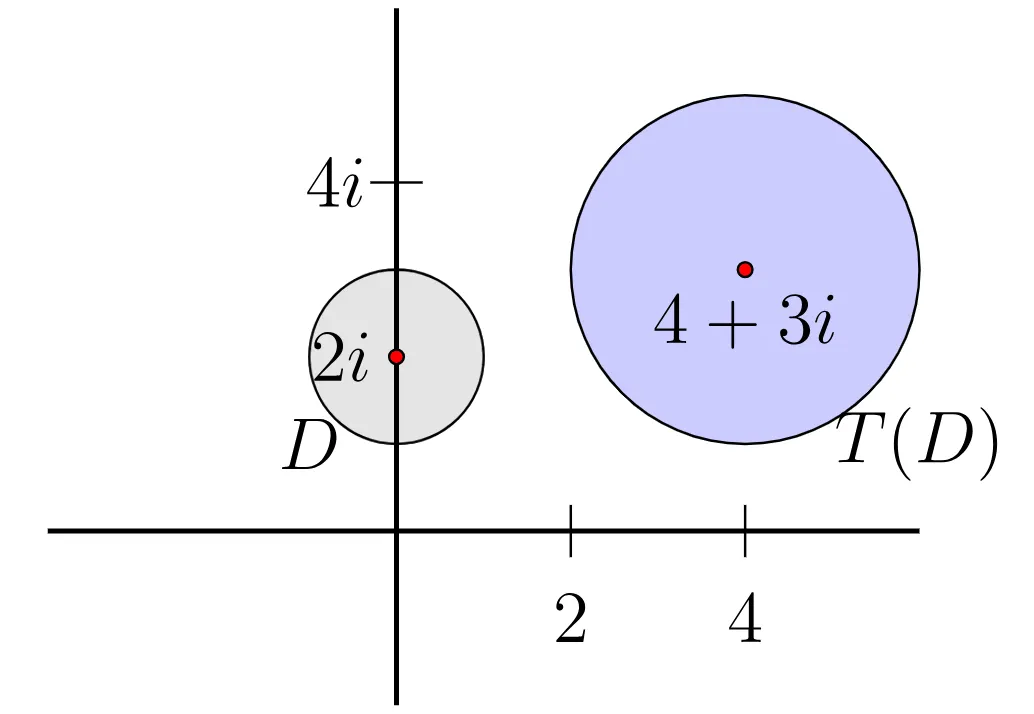
example 3.1.10. The image of a disk
원판(disk) 가 있고 함수 가 로 정의하자. 이 때 원판 는 를 중심으로 하고 반지름이 인 원판(disk)이 되고 아래그림과 같다.
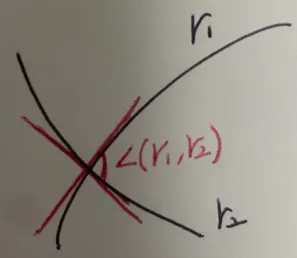
다음은 스무스 곡선(smooth curve) 사이의 각(angle)들을 보존하는 변환(transformation)에 대해 살펴본다. 평면곡선(planar curve)는 실수구간(real number interval)을 평면(plane)으로 매핑하는 함수 를 말한다. 미분(derivative)값이 존재하고 모든 점이 이 아닌 곡선(curve)을 스무스(smooth)라고 한다. 과 가 한 점에서 접하는 복소공간 위의 스무스 곡선(smooth curve)이라고 하자. 곡선(curve) 사이의 각도(angle)는 라 표기하고 교점(point of intersection)에서 접선(tangent line)들 사이의 각으로 계산한다.
Definition 3.1.11
만약 에서 만나는 모든 스무스 곡선(smooth curves) 과 에서 를 만족하면 에서의 변환(transformation) 는 점 에서 각을 유지한다(preserves angles at point )고 한다.
에서의 변환(transformation) 가 의 모든 점을 변환해도 각이 유지되면 이때 각이 유지된다(preserves angles)라고 한다.
한 점에서 만나는 모든 스무스 곡선(smooth curve) 과 가 을 만족하면 의 모든 점에 대해 에서의 변환(transformation) 가 각의 크기를 유지한다(preserves angle magnitudes)라고 한다.
Theorem 3.1.12
일반선형변환(general linear transformation)은 각을 유지한다(preserve angles).
Proof.
Definition 3.1.13
변환 에서 를 만족하는 를 변환 에서의 고정점(fixed point)이라고 한다.
변환(transformation)을 해도 그대로 유지되는 점을 고정점이라고 한다. 만약 이라면 에서의 변환 는 고정점(fixed point)를 갖지 않는다(이므로 이라면 를 만족하는 가 있을 수 없다). 회전(rotation)과 확장(dilation)은 한 개의 고정점(fixed point)을 가지며 일반선형변환(general linear transformation) 은 일 때 한개의 고정점(fixed point)를 갖는다. 고정점(fixed point)를 찾기 위해선 에 대해 아래의 수식을 해결해야 한다.
예를들어 변환(transformation) 에 대한 고정점을 찾기위해선 를 만족하는 z를 찾아야 하므로 가 된다. 따라서 가 원판(disk) 를 로 이동시킬 때 에 해당하는 점들(points)은 움직이지 않는다.
Definition 3.1.14
에 대해 에서의 변환 가 를 만족하면 이를 유클리디안 아이소메트리(euclidean isometry)라고 한다.
유클리디안 아이소메트리(euclidean isometry)는 두 점 사이의 유클리드 거리(euclidean distance)를 유지한다.
example 3.1.15 Some Euclidean isometries of
이동(translation)과 회전(rotation)은 유클리디안 아이소메트리(euclidean isometry)하다. 일반선형변환(general linear transformation) 는 일 때 유클리디안 아이소메트리(euclidean isometry)하다.
example 3.1.16 Reflection about a line
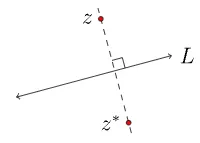
다음과 같이 정의되는 에서의 변환(transformation)을 직선 에 대한 반사(reflection about a line )이라고 한다.
위의 점은 자기 자신으로 가고, 위에 없는 점 는 직선 이 의 수직이등분(perpendicular bisector)선이 되도록 로 이동한다.
에 대한 반사(reflection)는 대수적으로 아래와 같이 표현할 수 있다. 만약 직선 이 실수축이라면 아래 식과 같이 반사함수는 켤레함수와 같아진다.
복소공간에서 직선 에 대해 반사(reflection)함수의 공식은 직선을 실수축에 대해 회전(rotation)과 이동(translation) 통해 변환하고 켤레를 취한 후 회전과 이동을 반대로 변환하면 만들 수 있다.
예를들어 직선 에 대한 반사(reflection)는 먼저 만큼 수직으로 이동(translate)하고 만큼 회전하고 실수축에 대칭한 후 만큼 회전한 후에 마지막으로 만큼 이동(translate)한다. 정리하면 아래와 같다.
을 계산하기 위해 오일러 공식을 활용한다. 이고 에 를 대입하고 정리하면 아래와 같다.
따라서 에 대한 대칭(reflection)을 정리하면 아래와 같다.
식을 일반화 시켜 위의 임의의 직선 에 대한 공식은 아래와 같다.
반사(reflection)은 회전(rotation)이나 이동(translation)보다 좀 더 기본형에 가까운 변환이다.
Theorem 3.1.17
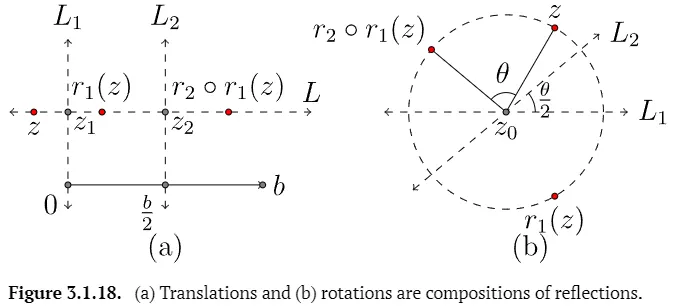
•
에서 이동(translation)함수는 두 평행선에 대한 반사(reflection)함수의 합성함수다.
•
에서 점 에 대한 회전(rotation)함수는 에서 교차하는 두 선에 대한 반사(reflection)함수의 합성함수다.
Theorem 3.1.19
직선 에 대한 반사(reflection about a line )는 유클리디안 아이소메트리(euclidean isometry)다. 또한 모든 반사(reflection)는 직선(line)을 직선으로, 원(circle)을 원으로, 그리고 각 크기 또한 보존한다.
Theorem 3.1.20
모든 유클리디안 아이소메트리(euclidean isometry)는 적어도 3개의 반사(reflection)의 합성으로 구성된다.